Precise positioning
Precise Point Positioning (PPP) is a positioning technique that uses a single GNSS (Global Navigation Satellite System) receiver that requires external information from analysis of the global GNSS permanent network. The original PPP concept was to introduce precise orbits and satellite clocks into the equation system as known parameters (Zumberge et al., 1997). The data is processed in a zero-differences level, so for precise applications it is necessary to consider satellite and receiver effects models: satellite antenna offsets, phase wind-up, receiver antenna offset and variation (Kouba, 2015). The first order ionosphere delay can be removed when processing dual frequency GNSS data which allows computing ionosphere-free linear combination L3 of code and carrier measurements. The tropospheric delays remain as estimated parameters that are represented in the equation system by zenith total delay (ZTD) and calculated into delays along the receiver-satellite paths using external mapping functions.
IGS Real-Time Products verification
On April 1, 2013 IGS launched real-time service (RTS), currently providing official GPS and unofficial GLONASS products including orbits, clocks, and code biases. The detailed verification of IGS RTS products can be found in:
Hadas T., and Bosy J. (2015). IGS RTS precise orbits and clocks verification and quality degradation over time, GPS Solutions, 19(1), 93-105
Performance of PPP in real-time
The availability of real-time makes PPP a very powerful technique to process GNSS signals in real-time and opens new PPP application opportunities: real-time troposphere monitoring, ocean buoy positioning for tsunami detection, deformation monitoring, seismic-related displacements detection.
We investigated the performance of GPS and GPS+GLO real-time PPP in both static and kinematic mode (see figures below). Tests carried out in static mode confirm, that the quality of GLONASS products is not yet as high as for GPS products. When only GPS products were used, a few millimeters of accuracy and precision were reached for all coordinate components in static mode, while the inclusion of GLONASS led to centimeter-level accuracy results. In kinematic mode, the use of GLONASS data led to improved determination of point height, while the horizontal coordinates were as well determined as in GPS only mode. More details can be found in the following paper:
Hadas T (2015) GNSS-Warp Software for Real-Time Precise Point Positioning. Artificial Satellites 50(2):59-76 (https://www.degruyter.com/view/j/arsa.2015.50.issue-2/arsa-2015-0005/arsa-2015-0005.xml)
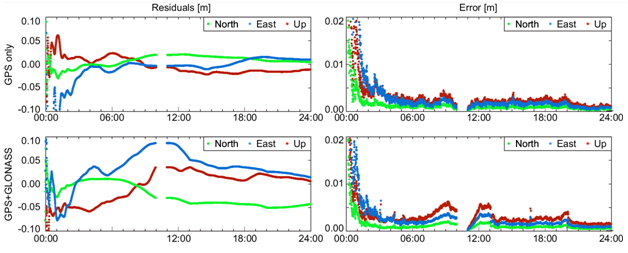
Fig. 1. Time series of residuals and estimated errors for GPS only with IGS01 stream (top) and GPS+GLONASS with IGS03 stream (bottom) real-time positioning in static mode for station WROC, DOY 114, 2014
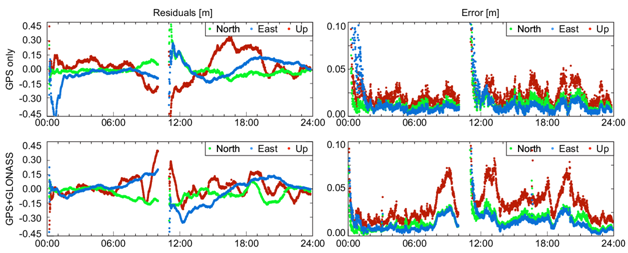
Fig. 2. Time series of residuals and estimated errors for GPS only with IGS02 stream (top) and GPS+GLONASS with IGS03 stream (bottom) real-time positioning in kinematic mode for station WROC, DOY 114, 2014
References:
[1] Zumberge, J. F., Heflin, M. B., Jefferson, D. C., Watkins, M. M., and Webb, F. H. (1997). Precise point positioning for the efficient and robust analysis of GPS data from large networks, Journal of Geophysical Research, 102, 5005-5018.[2] Kouba J (2015) A guide to using International GNSS Service (IGS) products. http://kb.igs.org/hc/en-us/article_attachments/203088448/UsingIGSProductsVer21_cor.pdf