GNSS data assimilation
Data assimilation combines atmospheric measurements with knowledge of atmospheric behavior as codified in computer models. With this approach, the “best” estimate of current conditions consistent with both information sources is produced. Some approaches allow assimilating also the non-prognostic variables, including remote sensing data from radar or GNSS (Global Navigation Satellite System). These techniques are named variational data assimilation schemes are based on minimization of the cost function which contains the differences between the model state (background) and the observations.
Our current research focus on the results of the assimilation of GNSS data into numerical weather prediction model WRF (Weather Research and Forecasting). The WRF model offers two different variational approaches: 3DVAR and 4DVAR, both available through WRF Data Assimilation (WRFDA) package. We apply the Zenith Troposphere Delay (ZTD) and Integrated Water Vapor (IWV) from GNSS network in Poland into the 3DVAR and 4DVAR assimilation schemes. The WRFDA default operators were altered to properly represent observation errors of GNSS estimates.
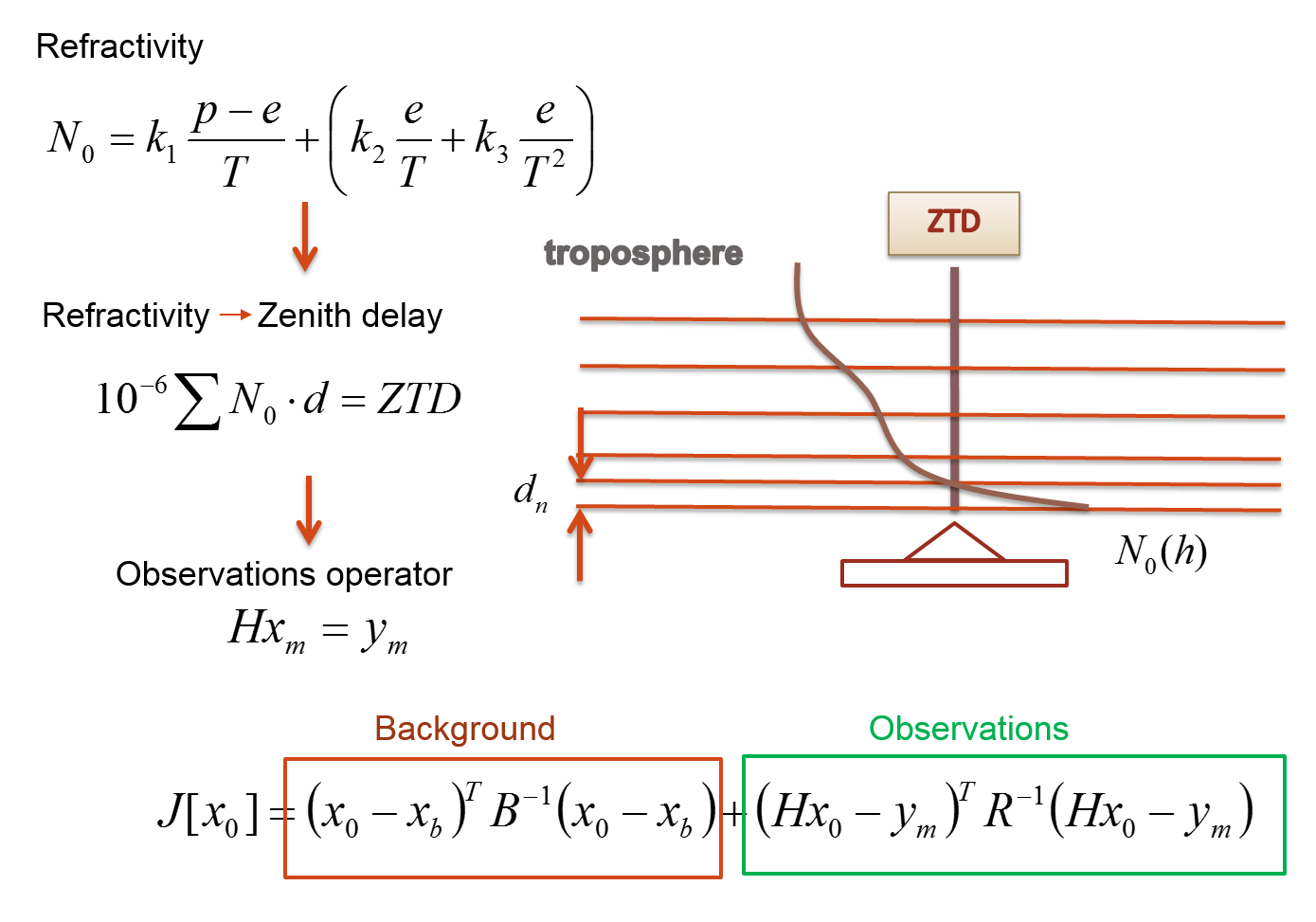
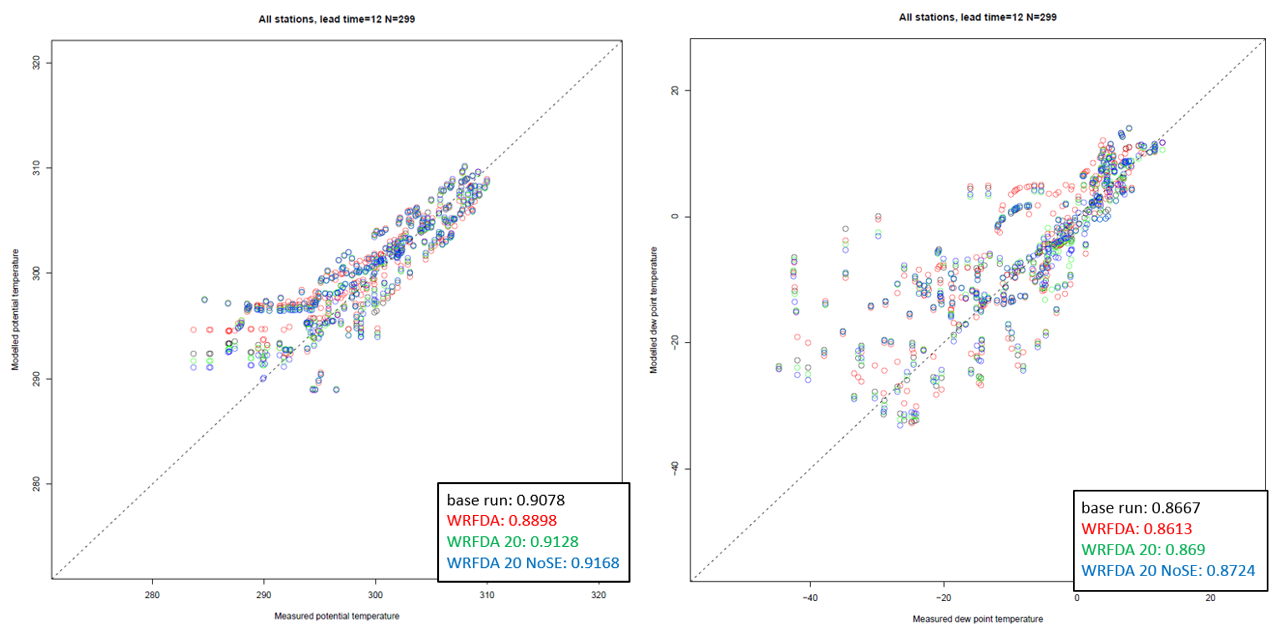
Fig.2. WRF w.r.t. radiosonde parameters: potential temperature (left) and dew point temperature (right) for 4 variants: base run – without assimilation, WRFDA – assimilation from 120 stations, WRFDA 20 – assimilation from 20 stations and WRFDA 20 NoSE – assimilation from 20 stations with removal of systematic error between GNSS and WRF
Our long-term plan is to assimilate the STDs (Slant Total Delays), firstly using 3DVAR technique. At the moment, the 2D raytracing algorithm is implemented and working on each forecast issued by University of Wroclaw. We are developing the optimal observation covariance matrix based on the ZTDs, gradients, partial derivatives of mapping functions as well as variance – covariance matrix as produced by Bernese 5.2. Processing Software.